মডুলেশন হল একটি অ-রৈখিক বৈদ্যুতিক প্রক্রিয়া যেখানে একটি সংকেতের (ক্যারিয়ার) পরামিতি অন্য সংকেত (মডুলেটিং, তথ্য) ব্যবহার করে পরিবর্তন করা হয়। যোগাযোগ প্রযুক্তিতে, ফ্রিকোয়েন্সি, প্রশস্ততা এবং ফেজ মড্যুলেশন ব্যাপকভাবে ব্যবহৃত হয়। পাওয়ার ইলেকট্রনিক্স এবং মাইক্রোপ্রসেসর প্রযুক্তিতে, পালস-প্রস্থ মড্যুলেশন ব্যাপক হয়ে উঠেছে।
বিষয়বস্তু
PWM কি (পালস প্রস্থ মডুলেশন)
মূল সংকেতের পালস-প্রস্থ মড্যুলেশনের সাথে, মূল সংকেতের প্রশস্ততা, ফ্রিকোয়েন্সি এবং ফেজ অপরিবর্তিত থাকে। আয়তক্ষেত্রাকার নাড়ির সময়কাল (প্রস্থ) তথ্য সংকেতের কর্মের অধীনে পরিবর্তন সাপেক্ষে। ইংরেজি প্রযুক্তিগত সাহিত্যে, এটি PWM - পালস-প্রস্থ মড্যুলেশন হিসাবে সংক্ষিপ্ত হয়।
কিভাবে PWM কাজ করে
পালস প্রস্থ মড্যুলেটেড সংকেত দুটি উপায়ে গঠিত হয়:
- এনালগ
- ডিজিটাল
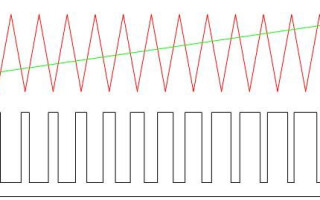
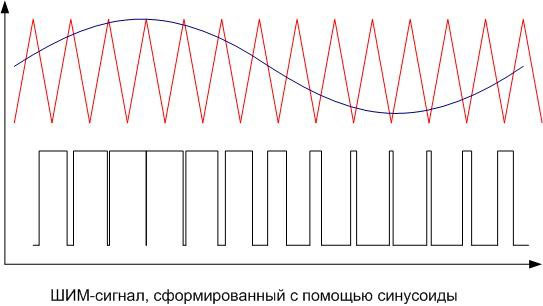
একটি PWM সংকেত তৈরি করার অ্যানালগ পদ্ধতির সাহায্যে, একটি করাত বা ত্রিভুজাকার সংকেত আকারে একটি বাহককে একটি ইনভার্টিং খাওয়ানো হয় তুলনাকারী ইনপুট, এবং তথ্য - নন-ইনভার্টিংয়ের উপর। যদি তাত্ক্ষণিক ক্যারিয়ারের স্তরটি মড্যুলেটিং সংকেতের চেয়ে বেশি হয়, তবে তুলনাকারীর আউটপুট শূন্য, যদি কম হয় - এক। আউটপুট হল একটি বিচ্ছিন্ন সংকেত যার ফ্রিকোয়েন্সি বাহক ত্রিভুজ বা করাতের কম্পাঙ্কের সাথে সম্পর্কিত, এবং একটি পালস দৈর্ঘ্য মডুলেটিং ভোল্টেজের স্তরের সমানুপাতিক।
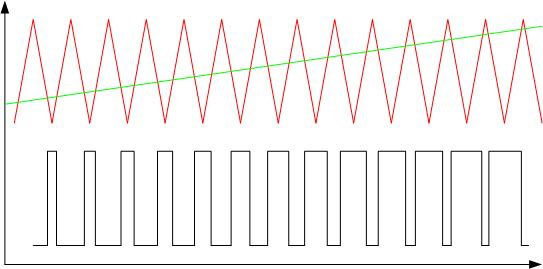
একটি উদাহরণ হিসাবে, একটি ত্রিভুজাকার সংকেতের পালস প্রস্থ মড্যুলেশন রৈখিকভাবে বৃদ্ধি পাচ্ছে। আউটপুট ডালের সময়কাল আউটপুট সিগন্যালের স্তরের সমানুপাতিক।
এনালগ পিডব্লিউএম কন্ট্রোলারগুলি প্রস্তুত-তৈরি মাইক্রোসার্কিটের আকারেও পাওয়া যায়, যার ভিতরে একটি তুলনাকারী এবং একটি ক্যারিয়ার প্রজন্মের সার্কিট ইনস্টল করা আছে। বাহ্যিক ফ্রিকোয়েন্সি-সেটিং উপাদানগুলিকে সংযুক্ত করার এবং একটি তথ্য সংকেত সরবরাহ করার জন্য ইনপুট রয়েছে৷ আউটপুট থেকে একটি সংকেত সরানো হয় যা শক্তিশালী বিদেশী কী নিয়ন্ত্রণ করে। প্রতিক্রিয়ার জন্য ইনপুটগুলিও রয়েছে - সেট নিয়ন্ত্রণ পরামিতিগুলি বজায় রাখার জন্য সেগুলি প্রয়োজন৷ যেমন, উদাহরণস্বরূপ, TL494 চিপ। এমন ক্ষেত্রে যেখানে ভোক্তার শক্তি তুলনামূলকভাবে কম, বিল্ট-ইন কী সহ PWM কন্ট্রোলার পাওয়া যায়। LM2596 মাইক্রোসার্কিটের অভ্যন্তরীণ কী 3 অ্যাম্পিয়ার পর্যন্ত কারেন্টের জন্য ডিজাইন করা হয়েছে।
ডিজিটাল পদ্ধতি বিশেষায়িত মাইক্রোসার্কিট বা মাইক্রোপ্রসেসর ব্যবহার করে সঞ্চালিত হয়। নাড়ির দৈর্ঘ্য অভ্যন্তরীণ প্রোগ্রাম দ্বারা নিয়ন্ত্রিত হয়। জনপ্রিয় PIC এবং AVR সহ অনেক মাইক্রোকন্ট্রোলারের, PWM "অনবোর্ড" এর হার্ডওয়্যার বাস্তবায়নের জন্য একটি অন্তর্নির্মিত মডিউল রয়েছে, একটি PWM সংকেত পেতে, আপনাকে মডিউলটি সক্রিয় করতে হবে এবং এর অপারেশন প্যারামিটার সেট করতে হবে।যদি এই ধরনের একটি মডিউল উপলব্ধ না হয়, তাহলে PWM সফ্টওয়্যার দ্বারা বিশুদ্ধভাবে সংগঠিত করা যেতে পারে, এটি কঠিন নয়। এই পদ্ধতিটি আউটপুটগুলির নমনীয় ব্যবহারের মাধ্যমে আরও শক্তি এবং স্বাধীনতা দেয়, তবে আরও নিয়ন্ত্রক সংস্থান ব্যবহার করে।
PWM সংকেতের বৈশিষ্ট্য
PWM সংকেতের গুরুত্বপূর্ণ বৈশিষ্ট্যগুলি হল:
- প্রশস্ততা (ইউ);
- ফ্রিকোয়েন্সি (চ);
- ডিউটি সাইকেল (এস) বা ডিউটি সাইকেল ডি।
ভোল্টের প্রশস্ততা লোডের উপর নির্ভর করে সেট করা হয়। এটি অবশ্যই ভোক্তার রেট দেওয়া সরবরাহ ভোল্টেজ প্রদান করবে।
পালস প্রস্থ দ্বারা পরিমিত সংকেতের ফ্রিকোয়েন্সি নিম্নলিখিত বিবেচনা থেকে নির্বাচিত হয়:
- উচ্চতর ফ্রিকোয়েন্সি, উচ্চ নিয়ন্ত্রণ নির্ভুলতা।
- ফ্রিকোয়েন্সি PWM দ্বারা নিয়ন্ত্রিত ডিভাইসের প্রতিক্রিয়া সময়ের চেয়ে কম হওয়া উচিত নয়, অন্যথায় নিয়ন্ত্রিত প্যারামিটারের লক্ষণীয় লহর ঘটবে।
- উচ্চতর ফ্রিকোয়েন্সি, উচ্চ সুইচিং ক্ষতি। এটি থেকে উদ্ভূত হয় যে কীটির স্যুইচিং সময় সীমাবদ্ধ। লক অবস্থায়, সমস্ত সরবরাহ ভোল্টেজ মূল উপাদানের উপর ড্রপ করে, কিন্তু প্রায় কোন বর্তমান নেই। খোলা অবস্থায়, পূর্ণ লোড কারেন্ট কী দিয়ে প্রবাহিত হয়, তবে ভোল্টেজ ড্রপ ছোট, যেহেতু থ্রুপুট প্রতিরোধ ক্ষমতা কয়েক ওহম। উভয় ক্ষেত্রেই, শক্তি অপচয় নগণ্য। এক রাজ্য থেকে অন্য রাজ্যে রূপান্তর দ্রুত ঘটে, তবে তাৎক্ষণিকভাবে নয়। আনলক-লক করার প্রক্রিয়ায়, একটি আংশিকভাবে খোলা উপাদানের উপর একটি বড় ভোল্টেজ নেমে যায় এবং একই সময়ে এটির মধ্য দিয়ে একটি উল্লেখযোগ্য কারেন্ট প্রবাহিত হয়। এই সময়ে, ছড়িয়ে পড়া শক্তি উচ্চ মান পৌঁছেছে। এই সময়কাল সংক্ষিপ্ত, কীটির উল্লেখযোগ্যভাবে গরম করার সময় নেই।কিন্তু সময়ের একক প্রতি এই ধরনের সময়ের ব্যবধানের ফ্রিকোয়েন্সি বৃদ্ধির সাথে, এটি আরও হয়ে যায় এবং তাপের ক্ষতি বৃদ্ধি পায়। অতএব, কী তৈরি করতে, দ্রুত উপাদানগুলি ব্যবহার করা গুরুত্বপূর্ণ।
- গাড়ি চালানোর সময় বৈদ্যুতিক মটর ফ্রিকোয়েন্সিটি একজন ব্যক্তির শ্রবণযোগ্য এলাকা থেকে সরিয়ে নিতে হবে - 25 kHz এবং তার বেশি। কারণ একটি নিম্ন PWM ফ্রিকোয়েন্সিতে, একটি অপ্রীতিকর বাঁশি ঘটে।
এই প্রয়োজনীয়তাগুলি প্রায়ই একে অপরের সাথে দ্বন্দ্বে থাকে, তাই কিছু ক্ষেত্রে ফ্রিকোয়েন্সি পছন্দ একটি আপস।
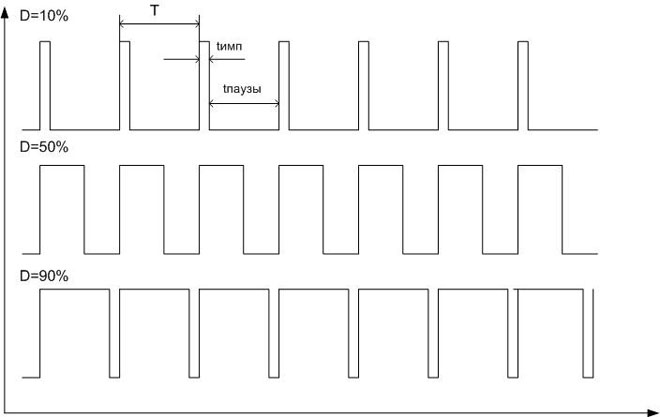
মড্যুলেশন মান শুল্ক চক্রকে চিহ্নিত করে। যেহেতু নাড়ির পুনরাবৃত্তির হার ধ্রুবক, পিরিয়ডের সময়কালও স্থির (T=1/f)। সময়কাল একটি আবেগ এবং একটি বিরতি নিয়ে গঠিত, একটি সময়কাল আছে, যথাক্রমে, টিimp এবং টিবিরতি, এবং টিimp+tবিরতি=টি। শুল্ক চক্র হল নাড়ির সময়কালের সাথে পিরিয়ডের অনুপাত - S \u003d timp/টি। কিন্তু বাস্তবে এটি পারস্পরিক মান ব্যবহার করা আরও সুবিধাজনক বলে প্রমাণিত হয়েছে - ফিল ফ্যাক্টর: D=1/S=T/timp. ফিল ফ্যাক্টরটিকে শতাংশ হিসাবে প্রকাশ করা আরও বেশি সুবিধাজনক।
PWM এবং SIR এর মধ্যে পার্থক্য কি?
বিদেশী প্রযুক্তিগত সাহিত্যে পালস-প্রস্থ মড্যুলেশন এবং পালস-প্রস্থ নিয়ন্ত্রণের (পিডব্লিউআর) মধ্যে কোনও পার্থক্য নেই। রাশিয়ান বিশেষজ্ঞরা এই ধারণাগুলির মধ্যে পার্থক্য করার চেষ্টা করছেন। প্রকৃতপক্ষে, PWM হল এক ধরনের মডুলেশন, অর্থাৎ, অন্যের প্রভাবে ক্যারিয়ার সিগন্যালে পরিবর্তন, একটিকে মডুলেশন করা। ক্যারিয়ার সিগন্যাল তথ্যের বাহক হিসেবে কাজ করে এবং মডিউলেটিং সিগন্যাল এই তথ্য সেট করে। এবং পালস-প্রস্থ নিয়ন্ত্রণ হল PWM ব্যবহার করে লোড মোডের নিয়ন্ত্রণ।
PWM এর কারণ এবং প্রয়োগ
পালস প্রস্থ মডুলেশন নীতি ব্যবহার করা হয় শক্তিশালী অ্যাসিঙ্ক্রোনাস মোটরের গতি নিয়ন্ত্রক. এই ক্ষেত্রে, সামঞ্জস্যযোগ্য ফ্রিকোয়েন্সি মডুলেটিং সংকেত (একক-ফেজ বা তিন-ফেজ) একটি কম-পাওয়ার সাইন ওয়েভ জেনারেটর দ্বারা উত্পন্ন হয় এবং একটি অ্যানালগ উপায়ে ক্যারিয়ারের উপর চাপানো হয়। আউটপুট একটি PWM সংকেত, যা প্রয়োজনীয় শক্তির কীগুলিতে দেওয়া হয়। তারপরে আপনি লো-পাস ফিল্টারের মাধ্যমে ডালের ফলের ক্রমটি পাস করতে পারেন, উদাহরণস্বরূপ, একটি সাধারণ আরসি সার্কিটের মাধ্যমে এবং আসল সাইনুসয়েড নির্বাচন করতে পারেন। অথবা আপনি এটি ছাড়া করতে পারেন - ইঞ্জিনের জড়তার কারণে পরিস্রাবণ স্বাভাবিকভাবেই ঘটবে। স্পষ্টতই, ক্যারিয়ার ফ্রিকোয়েন্সি যত বেশি হবে, আউটপুট তরঙ্গরূপ তত বেশি আসল সাইনোসয়েডের কাছাকাছি।
একটি স্বাভাবিক প্রশ্ন উত্থাপিত হয় - কেন অবিলম্বে জেনারেটরের সংকেত প্রসারিত করা অসম্ভব, উদাহরণস্বরূপ, শক্তিশালী ট্রানজিস্টর ব্যবহার করে? কারণ একটি রৈখিক মোডে কাজ করা একটি নিয়ন্ত্রক উপাদান লোড এবং কী এর মধ্যে শক্তি পুনরায় বিতরণ করবে। এই ক্ষেত্রে, মূল উপাদানের উপর উল্লেখযোগ্য শক্তি নষ্ট হয়। যদি একটি শক্তিশালী নিয়ন্ত্রণ উপাদান একটি কী মোডে কাজ করে (ট্রিনিস্টর, ট্রায়াক, আরজিবিটি ট্রানজিস্টর), তবে সময়ের সাথে সাথে শক্তি বিতরণ করা হয়। ক্ষতি অনেক কম হবে, এবং দক্ষতা অনেক বেশি হবে।
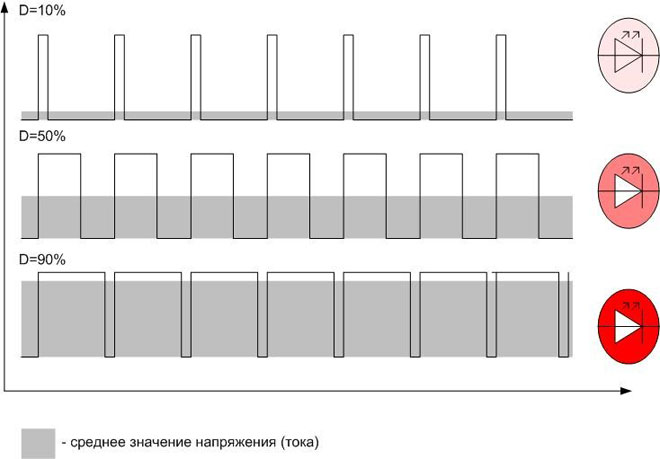
ডিজিটাল প্রযুক্তিতে, পালস-প্রস্থ নিয়ন্ত্রণের কোন বিশেষ বিকল্প নেই। সেখানে সংকেত প্রশস্ততা ধ্রুবক, ভোল্টেজ এবং কারেন্ট পরিবর্তন করা যেতে পারে শুধুমাত্র পালস প্রস্থ বরাবর বাহককে মড্যুলেট করে এবং পরবর্তীতে গড় করে। অতএব, PWM সেই বস্তুগুলিতে ভোল্টেজ এবং কারেন্ট নিয়ন্ত্রণ করতে ব্যবহৃত হয় যা পালস সংকেত গড় করতে পারে। গড় বিভিন্ন উপায়ে ঘটে:
- লোড জড়তার কারণে।এইভাবে, থার্মোইলেকট্রিক হিটার এবং ভাস্বর বাতিগুলির তাপীয় জড়তা নিয়ন্ত্রিত বস্তুগুলিকে ডালের মধ্যে বিরতিতে লক্ষণীয়ভাবে শীতল হতে দেয় না।
- উপলব্ধির জড়তার কারণে। LED এর নাড়ি থেকে নাড়িতে যাওয়ার সময় আছে, কিন্তু মানুষের চোখ এটি লক্ষ্য করে না এবং এটিকে বিভিন্ন তীব্রতার সাথে একটি ধ্রুবক আভা হিসাবে উপলব্ধি করে। এই নীতিটি LED মনিটরের বিন্দুগুলির উজ্জ্বলতা নিয়ন্ত্রণ করতে ব্যবহৃত হয়। কিন্তু কয়েকশ হার্টজ ফ্রিকোয়েন্সি সহ অদৃশ্য জ্বলজ্বল এখনও উপস্থিত রয়েছে এবং চোখের ক্লান্তি সৃষ্টি করে।
- যান্ত্রিক জড়তার কারণে। এই বৈশিষ্ট্যটি ব্রাশ করা ডিসি মোটরগুলির নিয়ন্ত্রণে ব্যবহৃত হয়। নিয়ন্ত্রণের সঠিকভাবে নির্বাচিত ফ্রিকোয়েন্সি সহ, মোটরটির মৃত বিরতিতে ধীর হওয়ার সময় নেই।
অতএব, PWM ব্যবহার করা হয় যেখানে ভোল্টেজ বা বর্তমানের গড় মান একটি নির্ধারক ভূমিকা পালন করে। উল্লিখিত সাধারণ ক্ষেত্রে ছাড়াও, PWM পদ্ধতিটি ওয়েল্ডিং মেশিন এবং ব্যাটারি চার্জার ইত্যাদিতে গড় প্রবাহ নিয়ন্ত্রণ করে।
যদি প্রাকৃতিক গড় করা সম্ভব না হয়, অনেক ক্ষেত্রে এই ভূমিকাটি ইতিমধ্যে উল্লিখিত লো-পাস ফিল্টার দ্বারা নেওয়া যেতে পারে (এলপিএফ) একটি RC চেইন আকারে। ব্যবহারিক উদ্দেশ্যে, এটি যথেষ্ট, তবে এটি অবশ্যই বুঝতে হবে যে বিকৃতি ছাড়াই কম-পাস ফিল্টার ব্যবহার করে PWM থেকে মূল সংকেতটি বিচ্ছিন্ন করা অসম্ভব। সর্বোপরি, PWM স্পেকট্রামে অসীম সংখ্যক হারমোনিক্স রয়েছে যা অনিবার্যভাবে ফিল্টারের পাসব্যান্ডের মধ্যে পড়ে। অতএব, পুনর্গঠিত সাইনুসয়েডের আকৃতি সম্পর্কে বিভ্রম তৈরি করা উচিত নয়।
অত্যন্ত দক্ষ এবং কার্যকর PWM RGB LED নিয়ন্ত্রণ। এই ডিভাইসটিতে তিনটি পি-এন জংশন রয়েছে - লাল, নীল, সবুজ।প্রতিটি চ্যানেলের আলোর উজ্জ্বলতা আলাদাভাবে পরিবর্তন করে, আপনি LED গ্লো (খাঁটি সাদা বাদে) প্রায় যেকোনো রঙ পেতে পারেন। PWM এর সাথে আলোক প্রভাব তৈরির সম্ভাবনা অন্তহীন।
একটি পালস প্রস্থ মড্যুলেটেড ডিজিটাল সিগন্যালের সবচেয়ে সাধারণ প্রয়োগ হল একটি লোডের মধ্য দিয়ে প্রবাহিত গড় বর্তমান বা ভোল্টেজ নিয়ন্ত্রণ করা। কিন্তু এই ধরনের মডুলেশনের অ-মানক ব্যবহারও সম্ভব। এটি সমস্ত বিকাশকারীর কল্পনার উপর নির্ভর করে।
অনুরূপ নিবন্ধ: